RoDe-based approach for SpMM and SDDMM
概述
本文是针对SpMM和SDDMM两个kernels给出了一种基于行分解的方法,采用的是Compressed Sparse Row格式来存储稀疏矩阵。通过将稀疏矩阵的行分解为Regular part和Residual part来分别进行计算优化,并设计了相应的负载均衡和细粒度Pipelining技术。
相关技术介绍
CSR格式
CSR格式是一种被广泛用于表示稀疏矩阵的方法。
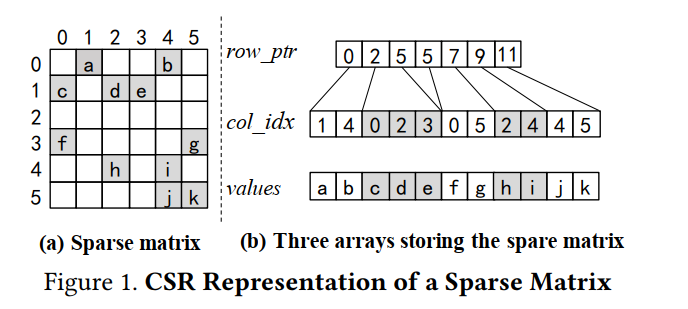
对于CSR格式,其一共使用三个数组来表示系数矩阵的信息,以图中信息为例
values数组,从左到右从上到下,记录稀疏矩阵中的非零元素值。 该数组大小等于非零元素的数量col_idx数组,记录每个非零元素值的列信息。 该数组大小等于非零元素的数量。row_ptr数组,row_ptr[i]记录了矩阵第i行元素的在col_idx中的开始位置,row_ptr[i+1]记录了矩阵第i行元素在col_idx中的结束位置。 例如,对于矩阵第0行,row_ptr[0]=0,row_ptr[1]=2,即说明第一行共有2-0=0个元素,占据了col_idx[0] col_idx[1]对应的两列。 对于矩阵第1行,row_ptr[1]=2,row_ptr[2]=5,说明第二行共有5-2=3个元素,占据了col_idx[2],col_idx[3],col_idx[4]对应的三列。 该数组大小为行数+1,图中矩阵有6行,因此row_ptr数组大小为7。
SpMM
Sparse Matrix-Matrix Multiplication 稀疏矩阵乘以稠密矩阵
核心思想是利用稀疏矩阵的稀疏性来减少计算量。在实际操作中,只有非零元素参与乘法运算,这大大减少了与稠密矩阵相乘时的浮点运算次数。稀疏矩阵通常以压缩存储格式(如CSR、CSC等)保存,以进一步减少内存占用和提高访问效率。
//Input : CSR A[M][N], dense B[N][K]
//Output : dense C[M][K]
for(int i = 0; i < M; i++)//row index从0到M-1,row_ptr[M]是通过i+1(i=M-1时)来访问的
{
for(int j = A.row_ptr[i]; j < A.row_ptr[i+1]; j++)
{
for(int k = 0; k < K; k++)
{
C[i][k] += A.values[j] * B[ A.col_idx[j] ][k]
}
}
}
SDDMM
Sampled Dense-Dense Matrix Multiplication 采样稠密-稠密矩阵乘法
SpMM和SDDMM在图神经网络中都有应用,因为GNN中邻接矩阵往往是稀疏的,而特征矩阵是稠密的。同样的稀疏矩阵在科学计算中也有应用,例如LOBPCG和iterative solvers with multiple right-hand sides。
//Input : CSR A[M][N], dense B1[M][K] B2[N][K]
//Output : CSR C[M][N]
for(int i = 0; i < M; i++)
{
for(int j = A.row_ptr[i]; j < A.row_ptr[i+1]; j++)
{
for(int k = 0; k < K; k++)
{
C.values[j] += B1[i][k] * B2[ A.col_idx[j] ][k]
}
C.values[j] *= A.values[j];
}
}
对于SpMM和SDDMM在GPU上实现并行时,通常先对最外层的i循环进行并行,每个warp/thread block处理一行,warp/thread block内则针对最内层的k循环进行并行。
相关工作
-
利用优化后的SpMV,将稠密矩阵分解为稠密向量,或者是直接使用SpMV的优化策略来优化SpMM并不能取得很好的效果(因为数据重用模式的差异)
- ASpT方法提出了自适应的分块技术来提高稀疏矩阵的数据局部性,通过列重排来构建dense tile
- Sputnik提出了ROMA方法来对sparse rows进行正则化从而使其可以应用vector memory指令,并提出了row swizzle技术在GPU上实现负载均衡
- 这些工作存在的问题:缺少稠密列(Scarcity of dense columns)会导致ASpT表现不佳甚至出现Slowdown的情况;长短行的不均匀分布(uneven distribution of long and short rows)会导致Spuntnik提出的技术受限。
- SpMM只对那些不规律分布的非0元素进行内存访问和计算,这导致了稀疏矩阵和稠密矩阵之间存在数据依赖问题,访问稠密矩阵的高延迟访存难以掩盖。
非0元素分布的研究
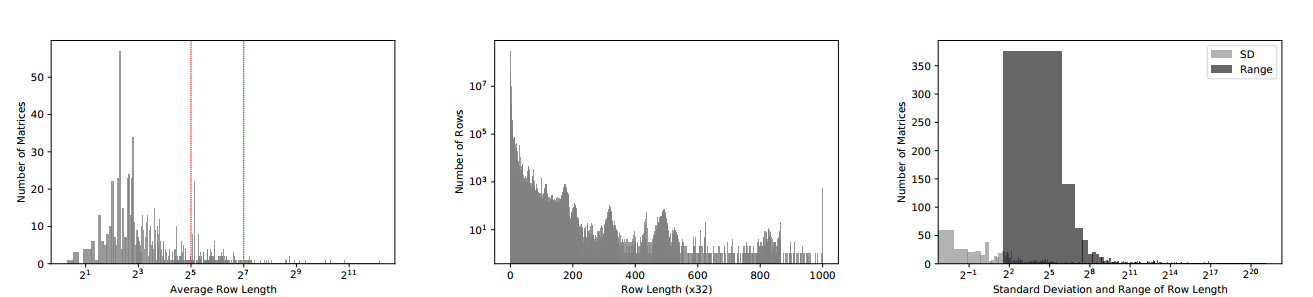
在SuiteSparse上进行统计
- 第一张图中可以发现,大部分行的长度是小于32的(32是一个warp内的线程数),因此为每一行分配一个warp实际上浪费了资源。
- 第二张图中表明,虽然绝大多数的行长度小于32,但仍有一部分行的长度达到了1000。
- 第三张图中,对于绝大多数矩阵,标准差(Standard Deviation)较小,说明大部分矩阵行的平均长度十分接近;而极差(Range)则偏大,说明有极少部分的行的长度远远偏离了平均长度。这表明大部分稀疏矩阵都是由大量的短行和少数的长行组成的。
特征1中,大量的短行成为了充分利用GPU的计算和访存资源的瓶颈。
特征2表明针对长行进行优化也能够带来一定的收益。
特征3则表明1与2反应的情况在大部分稀疏矩阵中同时存在。
SpMM流水线
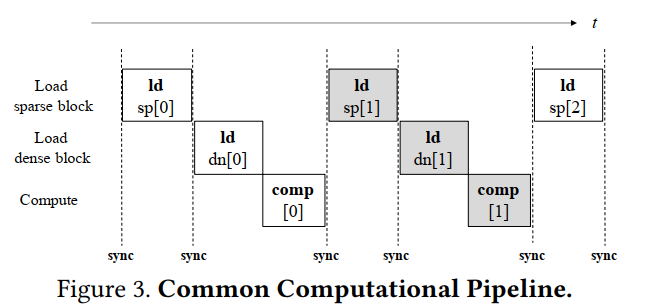
Sync存在的原因:To enable the reuse of sparse blocks among threads
RoDe

RoDe方法首先将稀疏矩阵的每一行分为block part和residual part,之后通过block split方法对block part进行划分以实现负载均衡,最后通过构建sub-block pipeline在连续的同步操作之间实现更多操作以更好地掩盖访存开销。
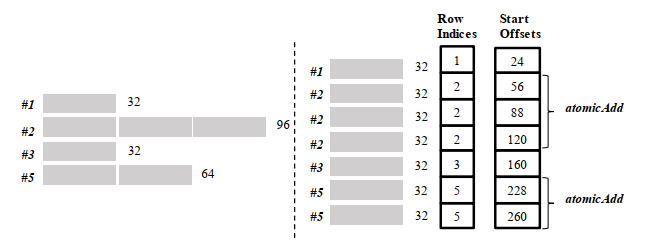
Row Decomposition
行分解首先是将每一行分解为若干个block part,每个block part含有32的整数倍个非0元素(32即一个warp内的线程数)。如下图的例子所示,所有满足这一大小的块被放入到(a)代表的block part中,少于32元素的则被放入residual part中。并用两个数组来记录相关信息,Row Indices[]负责记录当前这一块是属于哪一行的;Start Offsets记录了该part的首个元素在原本的若干行中的位置,例如对于residual part #2,其原本的位置应该是#0长度+#1长度+#2的block_part长度,即$24+32+32\times 3=152$ 。
相应的计算可以如下表示
For (a)\\
Start_Offsets_(a)[i]=row_ptr[Row_Indices_(a)[i]]
For (b)\\
Let r_idx=Row_Indices_(b)[i] N_B=32\\
Start_Offsets_(b)[i]=row_ptr[r_idx+1]-(row_ptr[r_idx+1]-row_ptr[r_idx])%N_{B}
第二个算式比较复杂,这里结合例子来说明,比如对于#2的(b)部分来说,后半部分括号内的算式实际上就是row_ptr[3]-row_ptr[2],那么结合CSR中row_ptr的含义,这个式子实际上算的就是原本#2整行里面的非0元素数,即104,104%32=8,实际上就是#2的residual part的元素数,而前半部分row_ptr[3]实际上反映了前三行(即#0 #1 #2)总的非0元素数,即23+32+104=160,前三行总的元素数减去#2的residual part里面的元素数,自然就是#2 residual中首个元素在原本所有元素中的offset了,即160-8=152。

Block Split
非零元素分布的特征2和特征3表明,同一个矩阵的不同行长度可能会存在较大的差异,因此,需要保证负载均衡。因此,对于row decomposition后的Block part还需要进一步的划分。
这里每个block part又按照Ns的固定大小被划分为若干块,每块都有对应的Row Indices来说明它们原本属于哪一行,Start Offsets则用于说明这一块的首个元素的Index,例如对于#2的第二块,其offset就是#0长度+#1长度+#2的第一块长度,即24+32+32=88。
之后这些块都被当作单独的一行进行处理,原本属于同一行的块通过atomicAdd指令获取结果。尽管atomicAdd会引发额外的开销,通过调整Ns的大小,可以实现比较好的负载均衡折中(实际应用中将Ns设定为512)。
该部分相关计算如下所示
thread index=t_idx
N_B=32 N_S=512
rowLen = row_ptr[t_idx+1]-row_ptr[t_idx]
n_{res}=rowLen % N_B >0 //res部分数量
n_{blk} = floor(rowLen / N_S)+(rowLen > N_B) //block部分数量
N_{res} = prefixSum(n_{res}) //res部分数组标记序数
N_{blk} = prefixSum(n_{blk}) //block部分数组标记序数
if n_{res} > 0
Row_Indices_{res}[N_{res}]=t_idx
for i=0 to N_{blk}:
Row_Indices_{blk}[N_{blk}+i]=t_idx
Start_Offsets_{blk}[N_{blk}+i]=row_ptr[t_idx]+i * N_S
Sub-block Pipeline
在前图所示的传统的load-computation pipeline中,访问global memory会带来较大的开销。Sub-block pipeline方法的作用就在于更好的重叠shared memory访问、global memory访问和计算。该方法的principle很简单,就是在高延迟的访存进行时,尽可能的issue更多的指令或者进行更多计算。

为了提升数据重用性,Sparse blocks被加载进shared memory中,而dense blocks的列向量则直接加载到每个线程的寄存器中,累计计算结果也是存储在寄存器中。因为load sparse block的时候需要使用col_idx来获取相应的dense block中的行,因此在load dense block之前必须进行一次同步,保证所有线程都获取到了col_idx的值。
由于sparse block与dense block之间的数据量存在较大差异,因此,在加载完sparse block[0-1]之后,可以先加载dense block[0],然后在进行[0]上的计算时,加载dense block[1],在计算[1]的时候,完成sparse block[2-3]的加载,依次类推,实现流水线的重叠,掩盖访存延迟。
SpMM Kernel实现
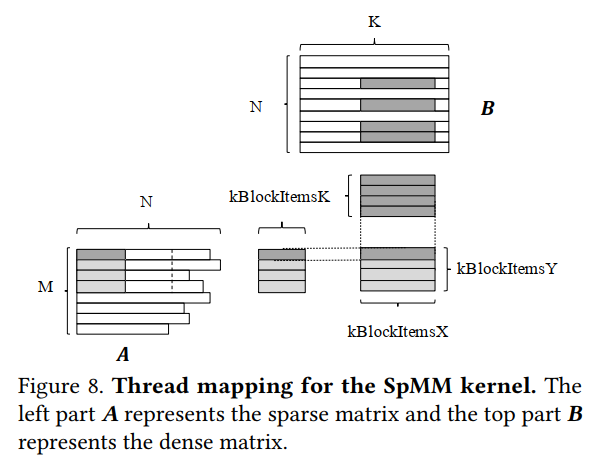
上图中的两种深色部分表示每个thread block每次计算的部分。颜色更深的那种代表了一次sparse block part与dense block part的相乘计算,即sparse的一行的一部分去依次乘以dense的好几个列,得到相应的结果。
Block part的计算实现
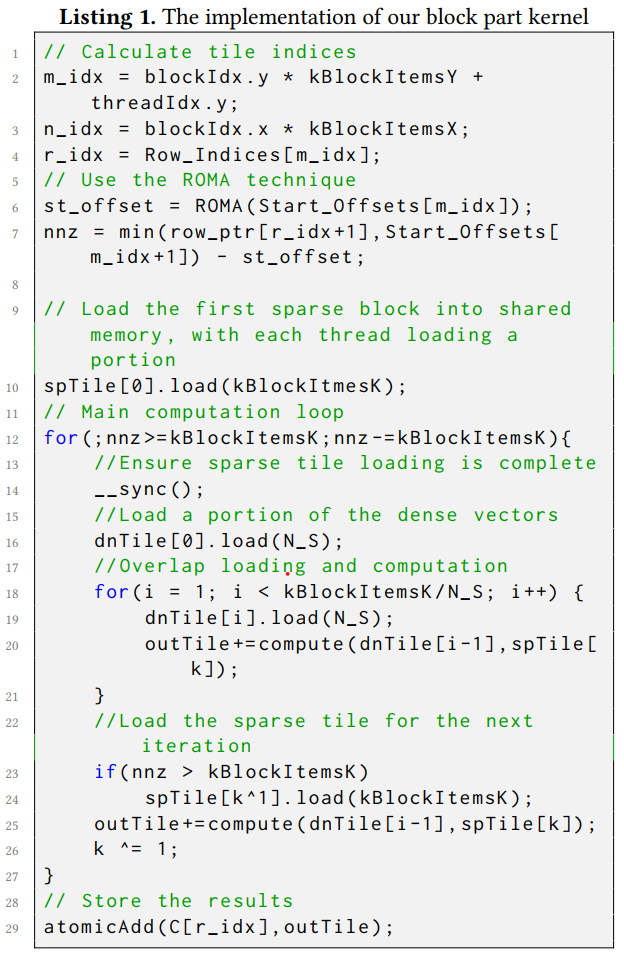
1-3行:计算分块索引并进行thread mapping
4-7行:进行row decomposition和block split操作
10-27行:进行sub-block pipeline
29行:通过atomicAdd操作进行累加
Residual part的计算实现
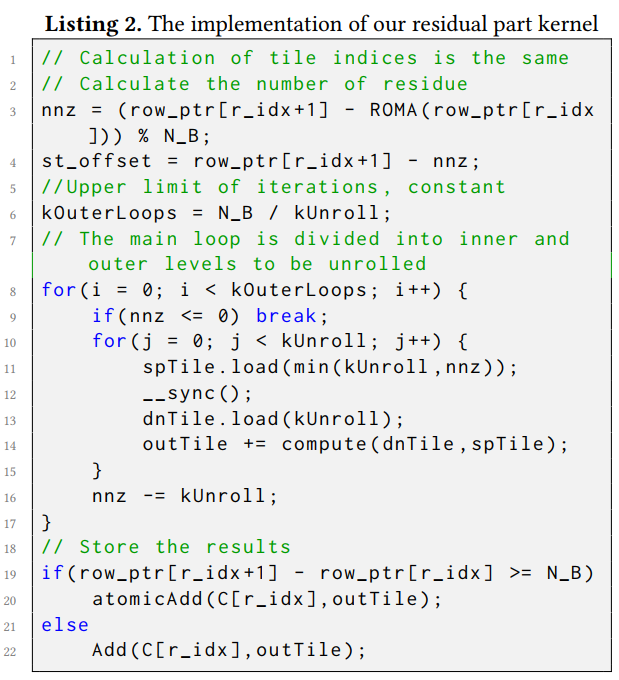
7-17行利用了Sputnik中的residue unroll技术
18-22行则尽可能减少atomicAdd指令的使用避免性能下降
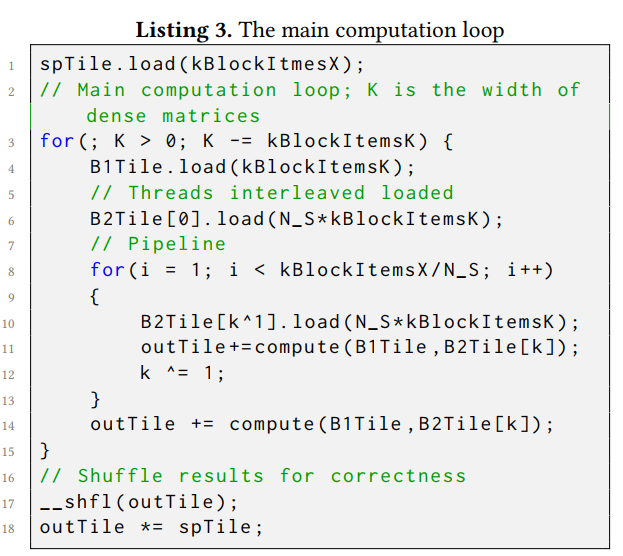
SDDMM Kernel实现
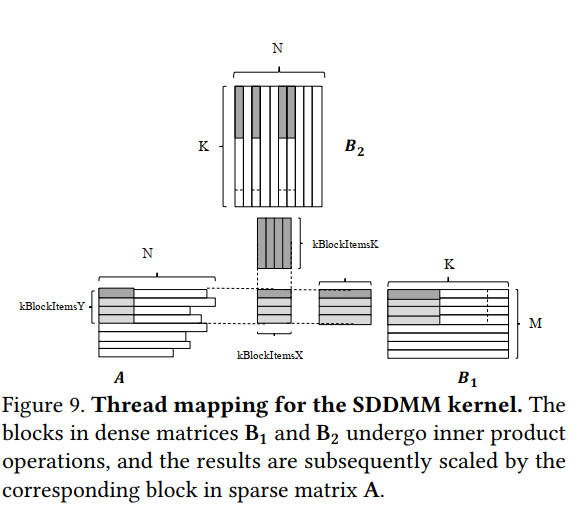
SDDMM的逻辑大部分都与SpMM相同,不同处:
in B_1 each thread loads kBlockItemK / #threadsOfSubwarp elements
in B_2 each thread loads kBlockItemX * kBlockItemK / #threadsOfSubwarp elements
两种loads是以交错方式进行的,以合并内存访问,因此最终需要用shuffle指令来交换和归约线程之间的结果,相应的实现如下图所示。
总结
本文对于单节点稀疏矩阵乘法的优化是从非零元素的分布来入手的,根据对SuiteSparse中稀疏矩阵的研究,发现了稀疏矩阵的3个特征,总结来说就是短行较多且占主要部分,长行普遍存在但占比较小。先前对于稀疏矩阵乘法的研究没有考虑到这一问题,造成了性能浪费和负载不均衡。因此本文从负载均衡的角度对矩阵进行了分块,分为block part和residual part,分别进行处理,并提出了sub-block pipeline技术来实现访存-计算重叠,从而有效提高SpMM和SDDMM的性能。